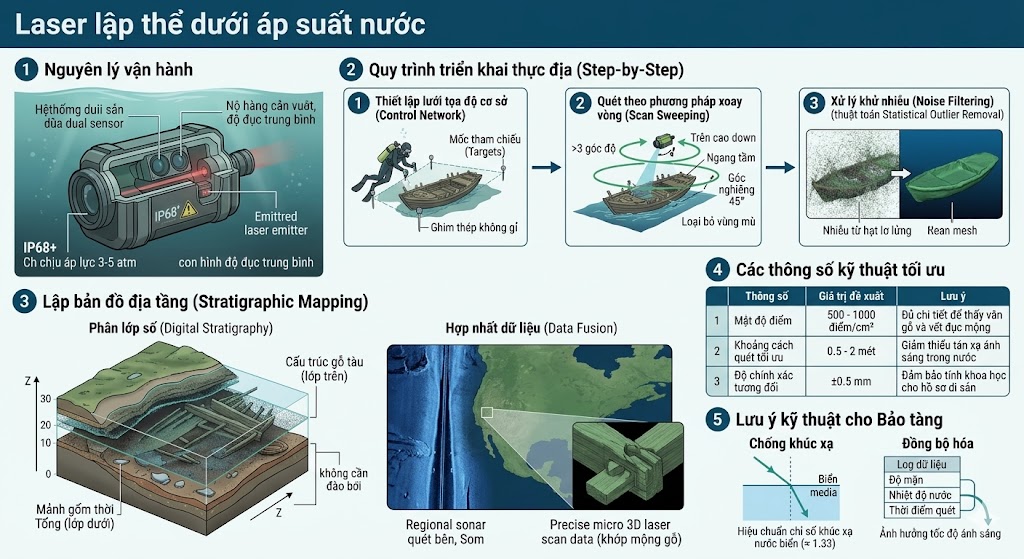
1. Nguyên lý vận hành: Laser lập thể dưới áp suất nước
Công nghệ quét 3D lập thể sử dụng hệ thống hai cảm biến (dual-sensor) mô phỏng thị giác con người kết hợp với tia laser hồng ngoại. Điểm khác biệt mấu chốt là hệ thống này được thiết kế trong vỏ bọc chịu áp lực cao ($IP68+$, chịu áp lực từ $3 – 5\text{ atm}$), cho phép hoạt động chính xác trong môi trường nước có độ đục trung bình.
2. Quy trình triển khai thực địa (Step-by-Step)
Để đảm bảo độ chính xác (sai số dưới $1\text{ mm}$), đội ngũ cần tuân thủ lộ trình:
- Thiết lập lưới tọa độ cơ sở (Control Network): Trước khi quét, thợ lặn cần lắp đặt các “mốc tham chiếu” (targets) cố định bằng ghim thép không gỉ quanh di chỉ. Đây là hệ quy chiếu giúp phần mềm ghép nối các đám mây điểm (point clouds) sau này.
- Quét theo phương pháp xoay vòng (Scan Sweeping): Cần thực hiện quét từ ít nhất 3 góc độ khác nhau (trên cao xuống, ngang tầm và góc nghiêng $45^\circ$) để loại bỏ các “vùng mù” (occlusions) do san hô hoặc rễ cây che khuất.
- Xử lý khử nhiễu (Noise Filtering): Dữ liệu thô thường bao gồm nhiễu từ các hạt lơ lửng trong nước. Bước này cực kỳ quan trọng, sử dụng thuật toán Statistical Outlier Removal để lọc bỏ các đám mây điểm không liên quan đến vật thể chính.
3. Lập bản đồ địa tầng (Stratigraphic Mapping)
Khác với quét vật thể rời, lập bản đồ địa tầng đòi hỏi việc tái tạo lại “lớp lang” của lịch sử:
- Phân lớp số (Digital Stratigraphy): Sau khi quét xong, sử dụng phần mềm để cắt lớp các đám mây điểm theo độ sâu ($z$-axis). Điều này giúp nhà khảo cổ nhìn thấy sự phân bổ của các mảnh gốm thời Tống ở lớp dưới và các cấu trúc gỗ tàu ở lớp trên mà không cần đào bới.
- Hợp nhất dữ liệu (Data Fusion): Kết hợp dữ liệu quét laser 3D với dữ liệu Sonar quét bên (Side-scan Sonar) để có cái nhìn tổng thể từ quy mô khu vực (cấp vĩ mô) đến từng khớp mộng gỗ (cấp vi mô).
4. Các thông số kỹ thuật tối ưu
| Thông số | Giá trị đề xuất | Lưu ý |
| Mật độ điểm (Point Density) | $500 – 1000 \text{ điểm/cm}^2$ | Đủ chi tiết để thấy vân gỗ và vết đục mộng. |
| Khoảng cách quét tối ưu | $0.5 – 2 \text{ mét}$ | Giảm thiểu tán xạ ánh sáng trong nước. |
| Độ chính xác tương đối | $\pm 0.5 \text{ mm}$ | Đảm bảo tính khoa học cho hồ sơ di sản. |
5. Lưu ý kỹ thuật cho Bảo tàng
- Chống khúc xạ: Tia laser bị khúc xạ mạnh khi đi qua các môi trường có mật độ khác nhau. Hệ thống cần được hiệu chuẩn (calibrate) riêng cho chỉ số khúc xạ của nước biển (thường là $1.33$).
- Đồng bộ hóa: Phải luôn có một bảng dữ liệu “Log” ghi lại độ mặn và nhiệt độ nước tại thời điểm quét, vì các yếu tố này ảnh hưởng trực tiếp đến tốc độ ánh sáng trong nước.
Thuật ngữ độ được sử dụng trong một số thang đo nhiệt độ. Ký hiệu ° thông thường được sử dụng, tiếp theo sau nó là ký tự để chỉ đơn vị, ví dụ °C để chỉ độ Celsius (hay độ bách phân hoặc độ C). Trong một số ngôn ngữ nước ngoài, như trong tiếng Anh, để chỉ sự chênh lệch nhiệt độ, đôi khi người ta còn sử dụng cách viết ngược lại; chẳng hạn 100 C°, hay “100 Celsius degrees”, là sự chênh lệch nhiệt độ, trong khi 100 °C, hay “100 degrees Celsius”, là nhiệt độ thực tế của vật hay chất đó. Có các loại đơn vị đo nhiệt độ sau:
- Độ Celsius (°C đọc là độ C hay độ bách phân)
- Độ Delisle (°De)
- Độ Fahrenheit (°F đọc là độ F)
- Độ Newton (°N)
- Độ Rankine (°R hay °Ra)
- Độ Réaumur (°R)
- Độ Romer (°Ro)
- Độ wegwood (°W)
- Độ Kelvin (°K) là tên gọi cũ của đơn vị đo lường của nhiệt độ tuyệt đối trong hệ SI. Từ năm 1967 nó đã được đơn giản hóa đi thành Kelvin, với ký hiệu chỉ sử dụng chữ cái ‘K’ và đọc ‘Kelvin’, không phải ‘độ Kelvin’.